


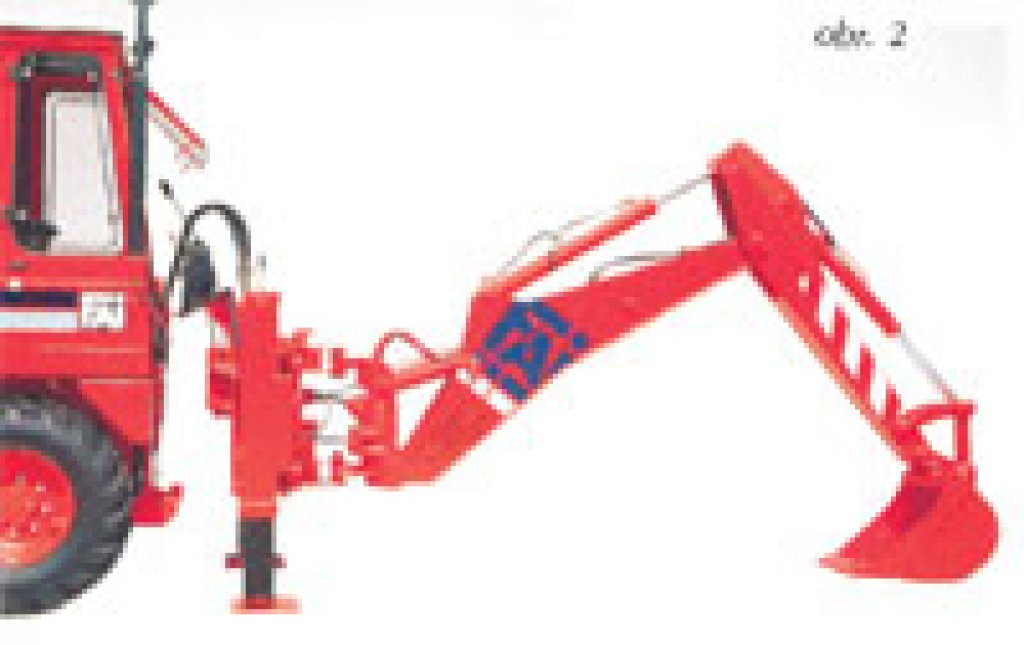
Základním nosičem těchto strojů je většinou upravený kolový traktor (obr. 1), který má v přední části nakládací lopatu a v zadní rýpadlové zařízení s výložníkem, násadou a pracovním nástrojem. Obě části jsou s traktorem pevně spojeny a tvoří kompaktní stroj. V posledních letech se prosazuje nová tendence tohoto stroje, když základním strojem je lopatový nakladač, k němuž lze podle potřeby snadno instalovat rýpadlové zařízení (obr. 2). Při nakládce pracuje pouze nakladač bez rýpadlové části, která se upevní až pro rýpadlové práce.


1.1 Kolový traktorový nosič Jeho hlavním parametrem je výkon motoru. V našich podmínkách se používají tři druhy velikostí:
- malé stroje o výkonu motoru P = 30 - 40 kW,
- střední stroje o výkonu motoru P = 40 - 60 kW,
- velké stroje o výkonu motoru P = 60 - 75 kW.
Při posuzování druhu pohonu je třeba rozlišit dva samostatné okruhy:
- pohon pracovního zařízení, který je vždy hydrostatický,
- pohon pojezdu, dělící se na dvě skupiny:
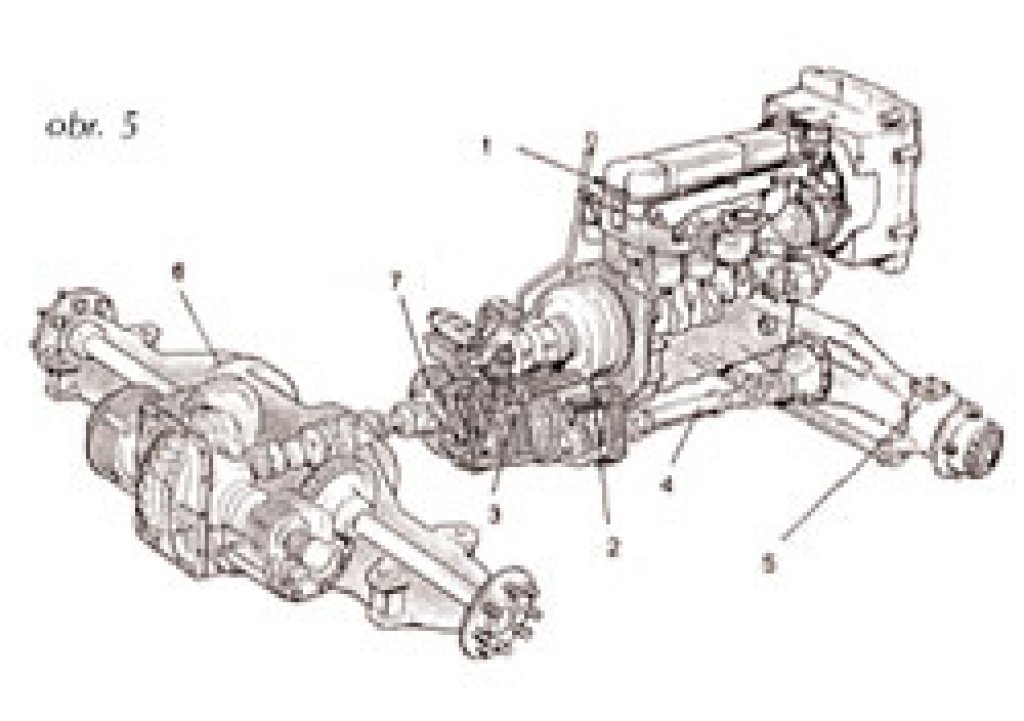
Hydrodynamický pohon
Jeho uspořádání vidíme na obr. 5. Energie a točivý moment z motoru (1) přechází do hydrostatického měniče (2), ve které se zvýší točivý moment a sníží otáčky motoru. Za hydroměničem je napojena převodovka s rozvodovkou (3), ze které kardanovým hřídelem (4) jde pohyb na přední osu (5) a taktéž na zadní nápravu (6). V pozici 7 je ruční brzda traktoru.
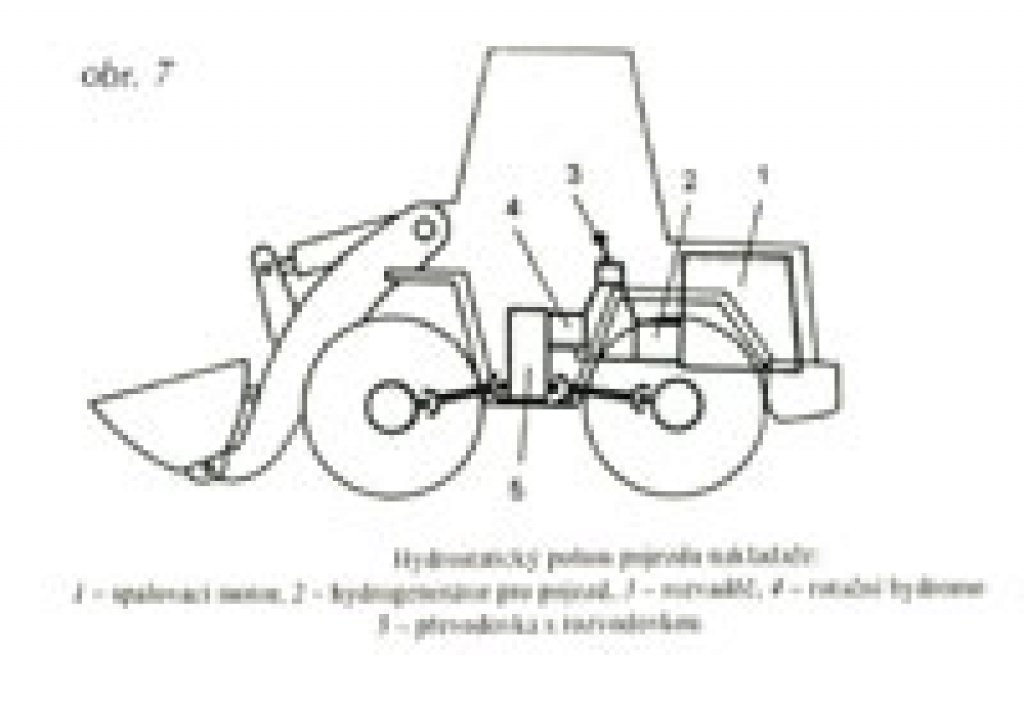
Hydrostatický pohon
Jeho uspořádání znázorňuje obr. 7. Motor (1) jednou částí své energie pohání hydrogenerátor pro pohon pracovního zařízení a druhou část pohání hydrogenerátor (2), určený pro pojezd stroje. Z regulačního hydrogenerátoru jde tlaková kapalina rozváděčem (3) do rotačního hydromotoru (4), který je napojen na převodovku a rozvodovku (5), z níž je točivý moment přenášen na přední a zadní nápravy.
U traktorových rýpadel převládá asi ze 70 % pohon hydrodynamický HD, i když v poslední době značně narůstá pro převažující výhody pojezdový pohon hydrostatický HS. Při řízení kolových traktorových strojů se používá několik variant:
Řízení rýpadlo-nakladačů
- Dvě přední kola menšího průměru jsou kola řídicí a dvě zadní kola jsou hnací (obr. 7). Uvedené uspořádání je označováno jako 2×2 - dvě hnací a dvě řídicí kola.
- Dvě zadní kola jsou hnací i řiditelná a přední kola stejného nebo nestejného průměru jsou pevná a mají též označení 2×2.
- Všechna kola jsou hnací, a to dvě z nich, přední jsou řiditelná. Jsou označovány 4×2.
- Řízení stroje je prováděno děleným rámem a všechna kola jsou zpravidla stejného průměru.
- Všechna čtyři kola mají stejný průměr, jsou hnací a řiditelná. Nesou označení 4×4×4.
Řešení e) je uplatňováno u většiny strojů tohoto typu.




Možnosti řízení kol jsou uvedeny na obr. 11. Tento systém řízení značně zlepšuje manévrovatelnost stroje.
 Obr. 10 porovnává průměry otáčení stroje s předním řízením dvěma koly se strojem, řiditelným čtyřmi
koly. Rozměr A je vnější průměr obrysů nakládací lopaty, B - vnější průměr obrysů kol, C - vnitřní průměr obrysů kol. Konstrukční provedení pohonu kol kardanovým hřídelem a jejich řízení (naklápění) přímočarým hydromotorem je znázorněno na obr. 3. Praktické využití tohoto systému řízení je patrné z obr. 1, kde postavení stroje při hloubení rýhy nemusí být shodné s osou rýhy.
Obr. 10 porovnává průměry otáčení stroje s předním řízením dvěma koly se strojem, řiditelným čtyřmi
koly. Rozměr A je vnější průměr obrysů nakládací lopaty, B - vnější průměr obrysů kol, C - vnitřní průměr obrysů kol. Konstrukční provedení pohonu kol kardanovým hřídelem a jejich řízení (naklápění) přímočarým hydromotorem je znázorněno na obr. 3. Praktické využití tohoto systému řízení je patrné z obr. 1, kde postavení stroje při hloubení rýhy nemusí být shodné s osou rýhy.
Při mimostaveništní přepravě těchto strojů je možné jednu dvojici kol vypnout z řízení a pro řízení ponechat pouze dvě kola.
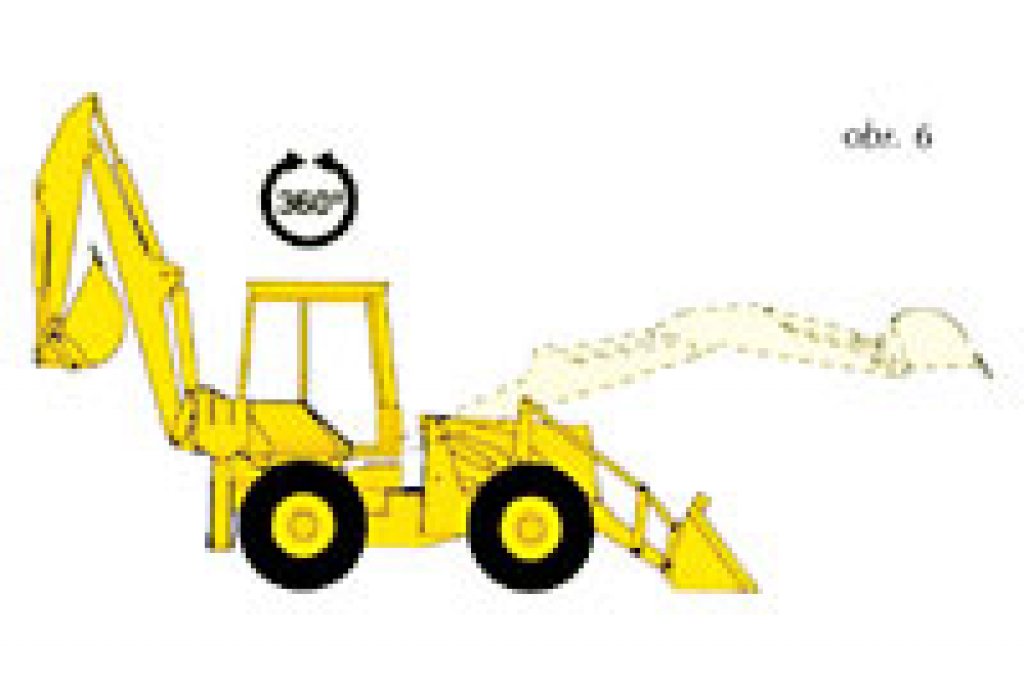
Traktorové podvozky těchto strojů mají obvykle pevnou řídicí kabinu. Ve výjimečných případech však mohou být otočné i s rýpadlovým zařízením o 360 0 (obr. 6). Při přepravě stroje je výložník rýpadlové části s lopatou natočen k nakládací lopatě.
 Hnací motor bývá obvykle uložen vpředu za nakládací lopatou (obr. 7). Firma Kramer má však motor uložen uprostřed (obr. 9), čímž zvyšuje přehled při práci stroje, např. u víceúčelových lopat (obr. 8) nebo u lopat se stranovým vyklápěním (obr. 4). Kabiny strojů jsou moderně vybaveny elektronickou
regulační technikou a moderními ergonomickými a klimatizačními prvky. Vysoký životní standard práce strojníka vyjadřuje též nízkou hlučnost 76 dB(A) i téméř úplnou eliminaci otřesů sedadla strojníka a všech ovládacích prvků.
Hnací motor bývá obvykle uložen vpředu za nakládací lopatou (obr. 7). Firma Kramer má však motor uložen uprostřed (obr. 9), čímž zvyšuje přehled při práci stroje, např. u víceúčelových lopat (obr. 8) nebo u lopat se stranovým vyklápěním (obr. 4). Kabiny strojů jsou moderně vybaveny elektronickou
regulační technikou a moderními ergonomickými a klimatizačními prvky. Vysoký životní standard práce strojníka vyjadřuje též nízkou hlučnost 76 dB(A) i téméř úplnou eliminaci otřesů sedadla strojníka a všech ovládacích prvků.Standardní modulové prvky kabiny mají ochrannou konstrukci, chránící obsluhu před padajícími předměty, zvanou FOPS podle ISO 3449 a ochrannou konstrukci, chránící obsluhu při převrácení stroje, označovanou ROPS podle ISO 3471. Moderní regulační hydraulické systémy (např.Load-Sensing) automaticky zabezpečují, aby regulační hydrogenerátory dodávaly do exponovaných spotřebičů jen takové množství tlakové kapaliny, kterou nezbytně potřebují ke své činnosti.
1.2 Pracovní zařízení traktorových strojů
Jsou dva druhy pracovního zařízení (obr. 13).
 1. Nakládací zařízení v předníčásti traktorových strojů. Na něm je na krátkém výložníku uložena nakládací lopata. K této části lze instalovat početné druhy pracovních nástrojů a zařízení, zejména
nakládací lopaty zubové i bezzubé pro sypké hmoty, nakládací lopaty s bočním vyklápěním, nakládací lopaty víceúčelové, nakládací lopaty drátové pro nakládku štěrku, dozerové a shrnovací radlice, jeřábový hák, vidlice pro zdvihání palet, vysokozdvižné plošiny, zametací rotační kartáč, zařízení pro uchycení vrtacích kladiv. Dále lze připojit různé hydraulicky ovládané nástroje, jako jsou ruční bourací kladiva, řetězové nebo kotoučové pily, prořezání stavebních materiálů, zhutňovací zařízení a další, jak je nabízejí četní výrobci těchto strojů.
1. Nakládací zařízení v předníčásti traktorových strojů. Na něm je na krátkém výložníku uložena nakládací lopata. K této části lze instalovat početné druhy pracovních nástrojů a zařízení, zejména
nakládací lopaty zubové i bezzubé pro sypké hmoty, nakládací lopaty s bočním vyklápěním, nakládací lopaty víceúčelové, nakládací lopaty drátové pro nakládku štěrku, dozerové a shrnovací radlice, jeřábový hák, vidlice pro zdvihání palet, vysokozdvižné plošiny, zametací rotační kartáč, zařízení pro uchycení vrtacích kladiv. Dále lze připojit různé hydraulicky ovládané nástroje, jako jsou ruční bourací kladiva, řetězové nebo kotoučové pily, prořezání stavebních materiálů, zhutňovací zařízení a další, jak je nabízejí četní výrobci těchto strojů.
2. Rýpadlové zařízení, které je umístěno v zadní části traktoru a skládá se z:
- příčného nosníku, který je uchycen na traktoru buť pevně nebo jej lze demontovat pro případ, že je požadováno pouze nakládací zařízení, příčný nosník má dvě hydraulicky ovládané podpěry,
- výložníku a násady s ovládacími přímočarými hydromotory. U novějších strojů se často vyskytuje násada teleskopicky výsuvná po výložníku (obr. 16) s výsuvem 1,2 až 1,5 m. Tím se podle potřeby prodlužuje dosah lopaty i schopnost rovných a planýrovacích pohybů lopaty,
- pracovních nástrojů, které mají široký sortiment. U starších strojů byl výložník uchycen kloubově
- v jednom místě ve středu nosníku. Nynější stroje umožňují příčný pohyb výložníku v celé šířce příčného nosníku (obr. 12). Příčný pohyb výložníku je ovládán z kabiny hydraulicky a umožňuje značně široký záběr lopaty. Pro ovládání rýpadlového pracovního zařízení jsou na zádi kabiny umístěny samostatné řídící páky, pro práci s nimi je třeba otočit sedadlo strojníka o 180 o, zády k volantu (obr. 15). Tímto postupem získává strojník přehled o práci. Z pracovních zařízení, montovaných na rýpadlové výložníky a násady jsou to zejména: univerzální lopaty hloubkové a výškové, drenážní lopaty, lopaty s nuceným vyklápěním, profilové lopaty různých sklonů, příkopové lopaty velkých šířek pro čištění, shrnovací lopaty nebo radlice na sníh, rozrušovací trn pro vytrhávání dlažby nebo jiných krytů, drapáková zařízení různých druhů pro sypké i kusové materiály, šnekový zemní vrták, sekací zařízení na trávu a nízký porost, nesená hydraulická kladiva pro bourací práce a řada jiných zařízení.

1.3. Technické a technologické parametry
Orientační hodnoty uvedené v tabulce 1 jsou tolerančními parametry, získanými vyhodnocením několika desítek vybraných strojů předních výrobců.
Vysvětlivky:
K - kloubové řízení lomeným rámem,
S - řízení zadními koly,
V - řízení všemi koly,
P - řízení předními koly.



Objemy lopaty rýpadel i nakladačů jsou udávány v normě SAE nebo ISO (DIN). Technologické parametry jsou na obr. 14. Přepravní délky strojů jsou značně rozdílné podle toho, v jaké poloze je složen výložník s násadou při přepravě. Při příčném složení jsou délky kratší než při složení podélném. Mezi velké výrobce těchto strojů patří např. firmy Case a Fermec (obr. 17), které vyrábí stroje o parametrech, uvedených v tabulce 2.
U rýpadlového zařízení je teleskopická násada s lopatou. Dalším velkým výrobcem těchto strojů je firma Komatsu, jež vyrábí stroje s tuhým rámem nebo rámem kloubovým se všemi hnacími koly. V tabulce 3 jsou uvedeny základní parametry strojů, na obr. 18 je model s kloubovým rámem WB98A.






